刚柔混合视觉伺服机器人
 项目图片
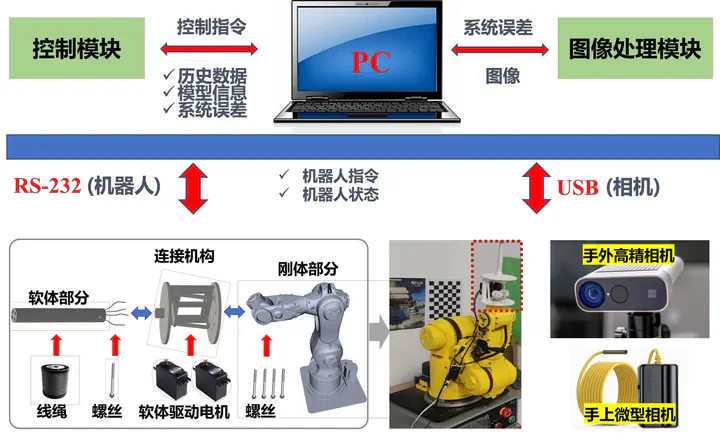
项目图片实验室自主研发项目旨在通过开发刚柔混合机器人的硬件平台和控制算法来增强机器人与环境的交互能力。在视觉伺服系统中引入输入映射模块,以减少干扰并提高响应速度。
显示层:
人机交互界面:
使用Qt开发,实现友好的操作和可视化界面。
服务层:
控制模块:
设计用于处理主要控制逻辑。
图像处理模块:
负责视觉数据处理,使用Python和MATLAB实现。
通信层:
串行通信协议:
包括RS和USB接口,用于数据传输和解析。
硬件层:
刚性机械臂:
作为主要执行机构,提供结构支撑和精确定位。
柔性机构:
集成用于提高顺应性和适应性。
高精度相机:
确保准确的视觉数据采集。
微型相机:
用于在受限或精细环境中提供额外的视觉输入。
这种分层架构确保了软硬件组件的无缝集成,实现视觉伺服应用中的精确可靠操作。
金碧辉
主任工程师
李德伟
长聘教授 | 实验室主任
现为中国自动化学会预测控制及智能决策专委会主任,控制理论与应用教育工作组委员,国际著名刊物Control Engineering Practice 编委,主持科技部重点研发计划项目、国家自然科学基金重点、面上及国际合作基金、国家863项目课题等20余项国家级项目,承担重点企业委托项目20余项