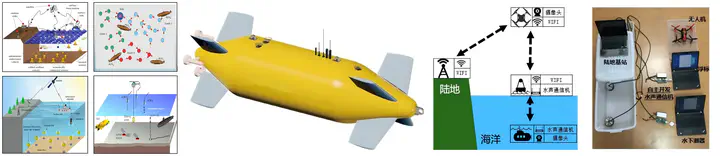
水下自主航行器(AUV)金碧辉, 李德伟最近更新于 1月 31, 313159这是一个自主研发项目,主要涉及水下自主航行器(AUV)的动力学建模、测试和优化。项目的主要目标包括面向多种水下应用的多源信息融合,以及跨介质空海协同系统的水下通信技术开发。Robot金碧辉主任工程师李德伟教授 | 实验室主任现为中国自动化学会预测控制及智能决策专委会主任,控制理论与应用教育工作组委员,国际著名刊物Control Engineering Practice 编委,主持科技部重点研发计划项目、国家自然科学基金重点、面上及国际合作基金、国家863项目课题等20余项国家级项目,承担重点企业委托项目20余项