Rigid-Soft Hybrid Visual Servo Robot
 Project Image
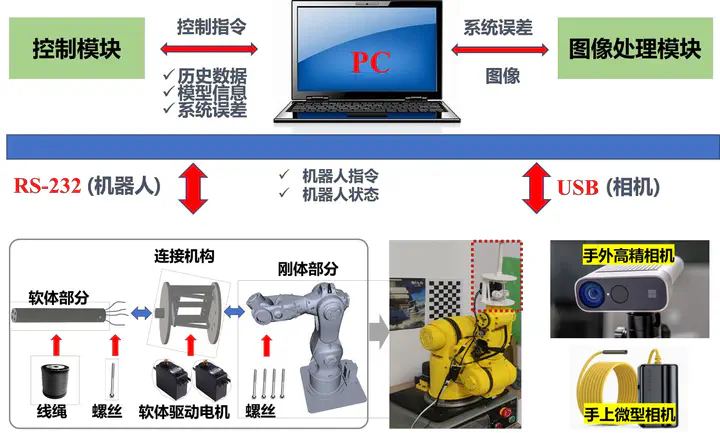
Project ImageThe lab’s self-funded project aimed to enhance robot-environment interaction by developing hardware platforms and control algorithms for rigid-soft hybrid robots. An input mapping module was introduced in the visual servoing system to mitigate disturbances and improve response speed.
Display Layer:
Human-Machine Interaction Interface:
Developed using Qt for user-friendly operation and visualization.
Service Layer:
Control Module:
Designed to handle the primary control logic.
Image Processing Module:
Responsible for processing visual data, implemented using Python and MATLAB.
Communication Layer:
Serial Communication Protocols:
Includes RS and USB interfaces for data transfer and parsing.
Hardware Layer:
Rigid Robotic Arm:
The main manipulator providing structural support and precision.
Soft Mechanism:
Integrated for enhanced compliance and adaptability.
High-Precision Camera:
Ensures accurate visual data acquisition.
Miniature Camera:
For additional visual inputs in constrained or detailed environments.
This layered architecture ensures seamless integration of software and hardware components, enabling precise and reliable operation in visual servo applications.
Bihui JIN
Staff Engineer
Dewei LI
Professor | Lab Leader
Currently serves as the Director of the Technical Committee on Predictive Control and Intelligent Decision of Chinese Association of Automation, Member of the Control Theory and Applications Education Working Group, and Editorial Member of Control Engineering Practice. He has led over 20 national-level projects, including Key Projects, General Projects and International Cooperation Projects from NSFC, Key Research and Development Programs from MOST. He has also undertaken more than 20 commissioned projects from key enterprises.