Autonomous Underwater Vehicle (AUV)
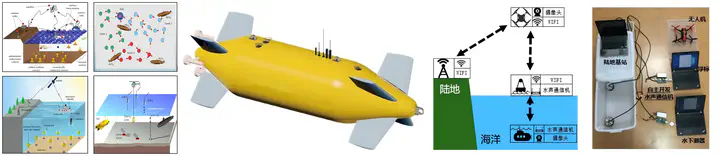
This self-funded project involved the dynamical modeling, testing, and optimization of AUVs. Key objectives included multi-source information fusion for diverse underwater applications and the development of underwater communication technologies for cross-medium air-sea collaborative systems.
Bihui JIN
Staff Engineer
Dewei LI
Professor | Lab Leader
Currently serves as the Director of the Technical Committee on Predictive Control and Intelligent Decision of Chinese Association of Automation, Member of the Control Theory and Applications Education Working Group, and Editorial Member of Control Engineering Practice. He has led over 20 national-level projects, including Key Projects, General Projects and International Cooperation Projects from NSFC, Key Research and Development Programs from MOST. He has also undertaken more than 20 commissioned projects from key enterprises.