Research Domains
Pioneering the Future of Control and Robotics
Welcome to our research hub, where innovation meets excellence. Our interdisciplinary team is dedicated to pushing the boundaries of technological advancement across multiple domains. Discover our groundbreaking research initiatives and transformative projects in the sections below.
Autonomous Robots
Our autonomous robotics research focuses on developing intelligent robots that can operate independently in complex environments. Our key research areas include:
- MPC Control for Embodied Robots
- Robot Perception and Scene Understanding
- Motion Planning and Control
- Multi-Robot Coordination
Model Predictive Control
Model Predictive Control (MPC) is an advanced process control method widely used in various industrial fields. Our research focuses on integrating AI and data-driven approaches with MPC:
Enhanced AI-MPC Algorithms
- Deep Learning for Model Identification & Policy Optimization
Data-Driven MPC
- Data-Efficient Model Learning
- Online Adaptation and Learning
Real-time MPC Research
- Embedded System MPC Optimization and Implementation
Intelligent Transportation
Our intelligent transportation research aims to develop advanced solutions for future transportation systems. Key research directions include:
- Unmanned Systems and 3D Transportation
- Traffic Flow Modeling and Prediction
- Transportation-Energy Co-optimization
Research Projects
Our main research projects
.js-id-robot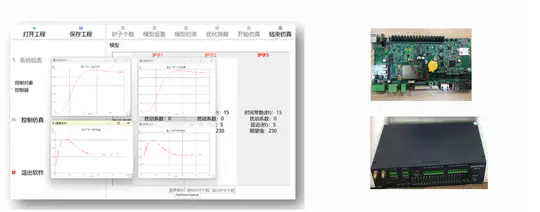





Integrated with data-driven MPC, the system offers customizable solutions for various industrial applications, adaptive setpoint calculations for multi-loop control, rich interface compatibility with mainstream protocols, and seamless integration with existing systems, making it ideal for adaptive real-time control in fields like injection molding, power generation, and manufacturing.
Developed predictive control strategies for electric vehicle thermal management, covering cooling, heating, dehumidification, and defrosting modes. Utilized MATLAB, Simulink, and Dymola for system modeling and validation, with HIL testing for real-time application. Collaborated with Shanghai Songzhi to create China’s first climate wind tunnel, achieving wind speed stability ±0.5 kph and temperature stability ±0.2°C.
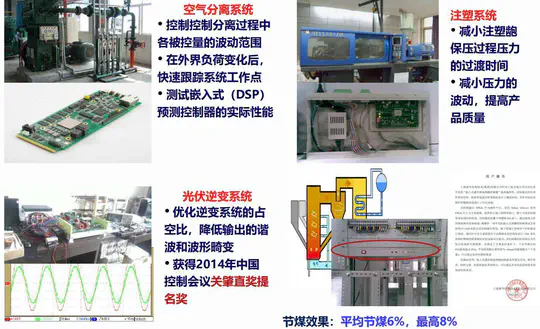
Focused on energy optimization in large-scale industrial systems, achieving a temperature qualification rate increase from 60% to 85% and product yield growth from 180 to 210 tons/hour in heavy plate cooling. Enhanced light oil yield in petrochemical systems by 0.49%, reducing energy consumption to under 70 kg of standard coal per ton. Improved system stability, energy efficiency, and diagnostics to minimize wastage and optimize process control.
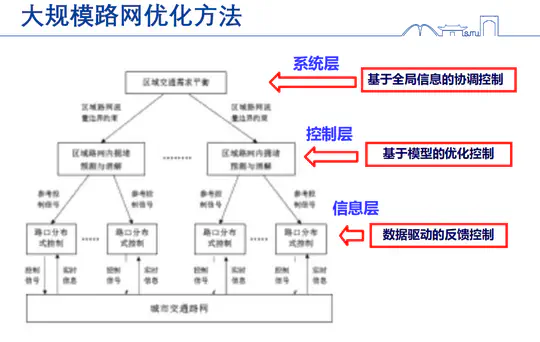
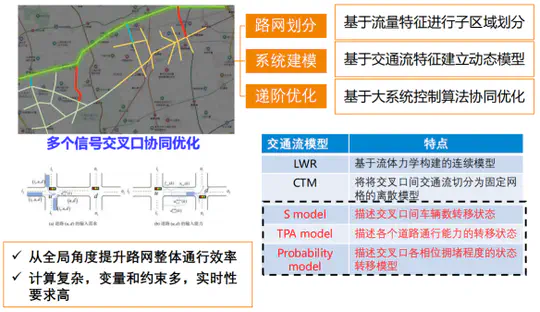
A hierarchical control framework is developed to optimize traffic management across large urban networks by balancing traffic demand and improving network-wide efficiency
Designed an embedded predictive control framework integrating FPGA for high-speed processing and DSP with dual neural networks for real-time control in medium-scale systems. Achieved high computational efficiency, parallel processing, and adaptability for injection molding, air separation, and photovoltaic systems, with multi-loop optimization and adaptive setpoint calculations.
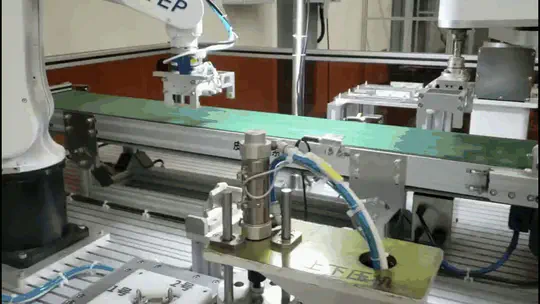
Under a National Key Research and Development Program, the laboratory developed a domestic robotic operating system. Key tasks included the design of path planning, motion control, and motion planning components for six commonly used industrial robots.
The AI Vision Cleaning Robot is an intelligent device focused on efficient cleaning, primarily targeting photovoltaic power stations and industrial cleaning scenarios. Through its AI vision system, the robot precisely identifies cleaning targets, utilizing waterless cleaning technology and modular design to significantly improve cleaning efficiency, extend equipment life, and reduce cleaning costs.
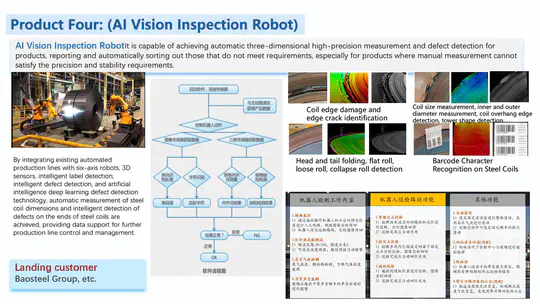
The AI Vision Inspection Robot is a highly efficient intelligent inspection system focused on 3D dimensional measurement and surface defect detection. Through AI technology, the robot achieves precise automatic recognition and classification, particularly suitable for quality control needs in metal processing, welding, and production lines. Its modular design allows for adjustment of working modes according to different inspection targets.
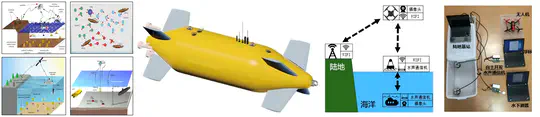
This self-funded project involved the dynamical modeling, testing, and optimization of AUVs. Key objectives included multi-source information fusion for diverse underwater applications and the development of underwater communication technologies for cross-medium air-sea collaborative systems.
Funded by the National High Technology Research and Development Program, this project focused on developing motion and trajectory planning software for dual-arm welding robots in complex gantry environments. The goal was to accumulate in dual-arm welding technology, specifically for large shipyards.
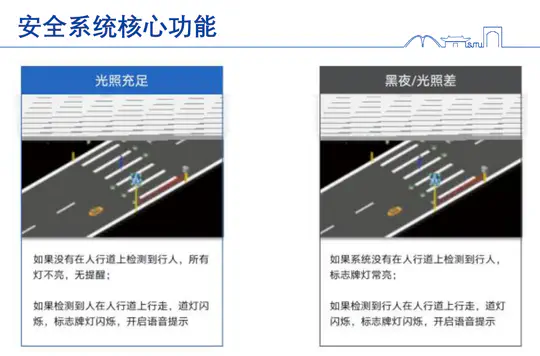
The LiDAR-based system enhances pedestrian safety by real-time detection and signal timing adjustment.
Noval MPC design and Project Implementation in various industrial fiels, including Air Separation system,Injection Molding system, PV Inverter system and Boiler Combustion system
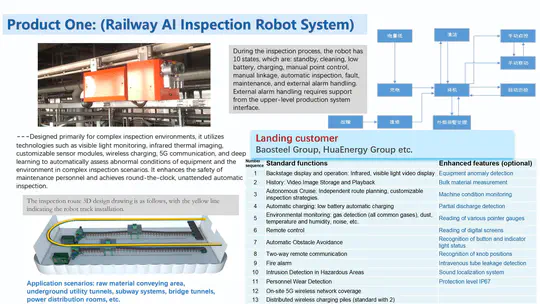
The Rail-mounted AI Inspection Robot System is an intelligent inspection solution designed for enclosed track environments. The system employs visible light monitoring, infrared thermal imaging, and AI algorithms to achieve comprehensive real-time monitoring of equipment status, helping users quickly identify and address potential risks. The robot supports multiple inspection modes including automatic, self-check, and manual operations, utilizing 5G communication for remote data transmission, providing security assurance for complex industrial environments.
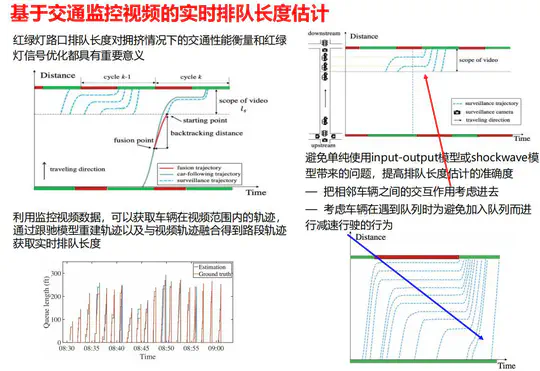
This system provides real-time queue length estimation using traffic video analysis, improving signal timing and congestion assessments.
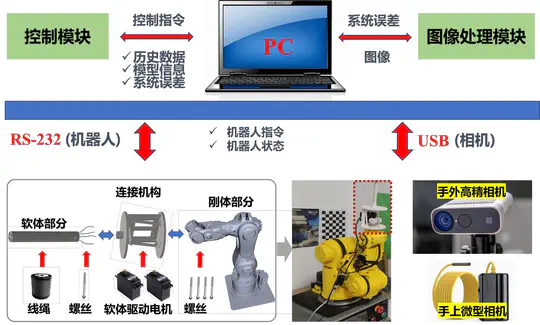
The lab’s self-funded project aimed to enhance robot-environment interaction by developing hardware platforms and control algorithms for rigid-soft hybrid robots. An input mapping module was introduced in the visual servoing system to mitigate disturbances and improve response speed.
The project designs software for traffic signal optimization at various scales, from single intersections to large road networks, focusing on reducing delays and improving flow efficiency.
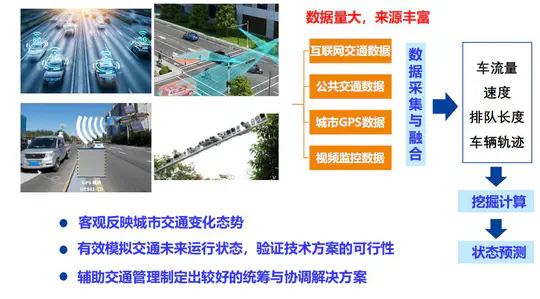
This project develops techniques for real-time traffic data processing and prediction, leveraging big data and multi-level urban road network models to improve urban traffic management.
The Wheeled AI Inspection Robot System, designed for open and complex industrial environments, is based on precise positioning and navigation algorithms and advanced visual AI recognition technology. The robot is equipped with voice interaction, intelligent obstacle avoidance, and data collection modules, capable of flexibly handling various inspection tasks while automatically generating inspection reports, significantly improving industrial inspection efficiency and safety.
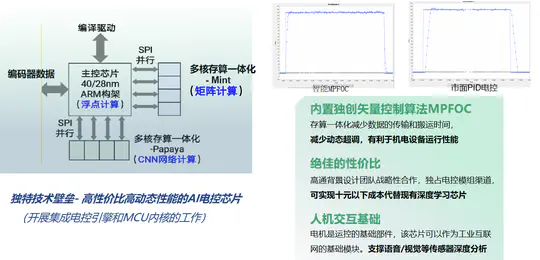
Pioneering the global application of non-von Neumann architecture for high-performance intelligent motor control modules, achieving optimal dynamic motor control performance.